中国科学技术大学工程科学学院和人形机器人研究院的研究团队成功研发了一种具有19自由度的轻质仿生灵巧手,这种手能够复现人手级别的功能。这项成果有望为全球上千万上肢截肢患者提供手部功能重建与日常生活辅助,并应用于人形机器人的灵巧操作。相关研究成果发表在《Nature Communications》期刊上。
人手有23个自由度,重量仅占人体总重量的大约1/150,但其运动功能却占据了全身运动功能的54%,是体现人类及人形机器人工作能力的关键部分。然而,现有的假肢手或人形机器人的灵巧手应用面临挑战。传统假肢手通常依赖电机驱动,功率密度低,难以平衡自由度与重量。过重的手会令佩戴者感到不适,而自由度较少的手只能实现有限的抓握动作,远不及人手灵活。这些问题导致近一半的假肢手被用户放弃使用。

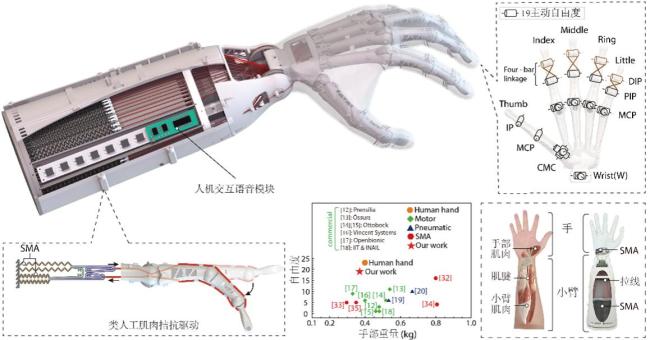
研究团队采用高功重比形状记忆合金作为人工肌肉驱动,设计了类肌腱传动系统以放大驱动力并减少阻力。通过内嵌23组传感单元,实现了关节精确控制,并集成了38组带有冷却模块的阵列式SMA驱动器,使得假肢灵巧手达到19个主动自由度。这款假肢灵巧手重量仅为0.37千克,具备与人手相当的操作能力,可完成梳头、写字、握手、递名片和下棋等精细任务,同时保证了佩戴舒适性、高自由度和精准控制。
此外,该假肢灵巧手结合了语音识别技术,支持60种语言和20种方言,识别准确率达到95%,响应时间达到毫秒级,适合广泛推广。临床测试中,一位60岁的女性截肢患者仅用半天就熟练掌握了假肢灵巧手的使用,完成了多项标准假肢手功能评估实验中的代表性任务,如南安普顿手功能评估程序(SHAP)和沃尔夫运动功能测试(WMFT)。此外,该假肢手还能操作剪刀、使用手机以及完成复杂的手语手势,重现了33种传统的人手抓握动作,并能完成6种新的高难度抓握动作。
该研究工作得到了国家自然科学基金及安徽科技创新攻坚计划重大项目的资助。
———END———
限 时 特 惠: 本站每日持续更新海量各大内部创业教程,一年会员只需168元,整站资源免费下载 点击查看详情
站 长 微 信: Jmbaoku